走行する現場環境の学習はロボット導入に重要で欠かせないステップです。。 10 年前、BALYO は、Simultaneous Localization and Mapping (SLAM) に基づいたロボット向けの最先端のアルゴリズムを開発し、フォークリフトの自動運転を可能にしました。
最新の LIDAR (光検出および測距) テクノロジーと独自のアルゴリズムを組み合わせた BALYO は、顧客環境に追加設備を追加することなく、ロボットは周囲から情報を取得し、計算して正確に自己位置を特定します。反射板もワイヤーもテープもありません。
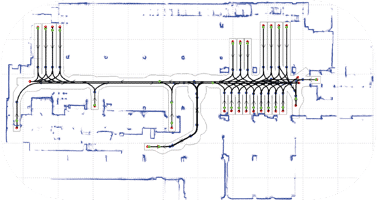
当社のツールにより、マップを作成することで、お客様の環境レイアウトをロボットに学習させます。マップは、壁、ラック、柱、機械など、施設のあらゆる構造要素を記録することで作成されます。このプロセスが完了すると、マップがロボットに記録されます。ロボットが移動している間、360度のスキャンを実行し、(LIDARを使用して)見た情報と認識している情報(参照マップ)をリアルタイムで関連付け、正確に自己位置を特定します(SLAM)。
BALYOのアルゴリズムは複雑な環境下でも、先進的なLIDAR、相対的知覚、VISIONなどで適応された技術を駆使して、十分に動作することが可能です。